ロボット・トライアスロン 競技ルール
2005年度版 (2004年度版を改訂)
ロボットトライアスロンは自律型ロボットがライントレース、風船割り、迷路の3種目を連続して行う競技です。競技の順位はコースを走行するのにかかった時間で競います。
競技コースの形状、および競技の種目順は、開催地の競技運営委員が会場に合わせて設定できるものとしますが、以下のルールは守ることとします。
- 1.競技コースと競技内容
競技コースはターポリンシート(注)をつないで作ります。ロボットは、このコース上で走行しなければなりません。コースの始めと終わりは幅18mm の黒色ビニールテープで区別されています。
競技に参加できるロボットには、車輪型の自律移動ロボットである限り、寸法や重量に特別な制限は設けないことにします。
注:ターポリンシート((株)テラモト製,規格 KT-4200,厚さ 0.42mm,材質 塩化ビニール,色 薄緑)
- 1-1 ライントレース種目
-
| ライン |
ラインは幅18mm の黒のビニールテープです。ラインは直線や円弧などの組み合わせで構成します。 |
| 走行領域 |
ラインの中心線の両側は、最小でも220mm ずつの走行領域が確保されていることとします。 |
| 競技内容 |
ライントレース種目領域のスタート位置からゴール位置までの走行時間を競います。 |
-
- 1-2 風船割り種目
-
| 風船 |
直径20cm 程度にふくらませたゴム風船を使用します。風船の個数は3個あるいは4個とします。 |
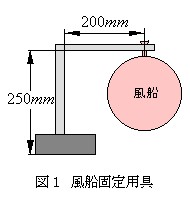 |
| 設置形態 |
基本的に風船は図1に示すような器具を用いて、30cm 以上の間隔をおいて設置するものとします。一部,釣り竿の先に風船を垂らし動きやすくした器具を使う予定です. |
| 競技内容 |
コース内に設置されている風船を割ります。割るための方法は、4に示す失格事項に触れないようにして下さい。 |
-
- 1-3 迷路種目
-
| 壁 |
厚さ50mmのスタイロフォームを,高さ150mmで任意の長さ切り出して壁を作ります. |
| 入口 |
迷路の入口の床面に,コースに直角な直線を,幅18mm の黒のビニールテープで引きます. |
| 出口 |
特に目印はありません.壁が無くなったところが出口です. |
| 通路 |
壁の間の距離は最低300mmを確保します.迷路エリアにラインはありません.床面によってはシートを敷きません. |
| 迷路 |
迷路を解くことが目的ではないので,簡単な通路程度のものとします.迷路は事前に公表しますが,内部の仕切り壁は,競技開始直前に,迷路のトポロジーを保ったまま,若干変更を加えます. |
| 競技内容 |
迷路エリアに,入口から侵入し,出口から出て下さい.途中であきらめることも可能ですが,その場合はあきらめた場所から出口までの大まかな距離に従ってペナルティーを科します.壁を動かしたり,壊したりした場合もペナルティを科します(図2参照,実際のコースと若干ちがいます). |
 図2迷路エリアのイメージ図 図2迷路エリアのイメージ図 |
2.得点基準
開催地の競技運営委員はコースの難易度に合わせて得点基準を設定できるものとします。ロボットの順位は総合タイムで競います.
- 2-1 総合タイム
- 走行タイムにペナルティタイムを加算して総合タイムとします。
- 2-2 走行タイム
- コースのスタートからゴールまでの走行時間を計測し,これを走行タイムとします.
- 2-2 ペナルティタイム
- 次の場合,罰則としてペナルティタイムを科します.
- 2-2-1 コース全域
- コースアウトがあった場合,及び,ハンドがあった場合
- 2-2-2 ライントレース種目
- ライン逸脱があった場合
- 2-2-3 風船割り種目
- 割れなかった風船があった場合
- 2-2-4 迷路種目
- 途中で通過をあきらめた場合,及び,壁を動かしたり壊したりした場合
-
- 注:ハンドとはロボットに触れる行為をいう.
3.コース仕様と得点基準の公表
ライン形状、風船位置、ポール位置などのコース仕様と得点の基準は、少なくとも競技開催日の7日前に公表します。
4.失格事項
ロボットが以下の事項に抵触する場合、競技運営委員または競技審判はロボットの競技参加を拒否あるいは競技を停止させることができます。
- 4-1 ロボット本体以外の器具や装置を使用して競技した場合
- 4-2 故意にコースを傷つけたり、汚したりした場合
- 4-3 観客や周囲に危害を与える装置があると認められたロボットの場合
- 4-4 ロボットが競技コースから完全に離れたり、動作が完全に停止した場合
- 4-5 競技会の運営を著しく妨げる場合
- 4-6 競技運営委員または競技審判が、失格事項に相当すると認めた場合
(C) ロボット・トライアスロン運営委員会 2005年 5月 24日 火曜日 更新