競技に参加できるロボットには、それが自律移動ロボットである限り、寸法や重量に特別な制限は設けないことにします。ただし、ロボットは2つ以上の部分に分離したまま競技を続けてはいけません。これには、競技者が競技中にロボットの上物またはカバー等をはずしたり、変形させることを含みます。また、競技走行はアピール走行のときと同じ部品構成で走行しなくてはなりません。
ロボットの移動性能により競技カテゴリを設けていますので、次の条件に従って、いずれかのカテゴリーでエントリーして下さい。1チームがエントリできるロボットは全カテゴリを通じて1台だけです。
-
ノーマル 移動機構に標準ロボットキットのギアボックス((株)タミヤ製6速ギヤボックスHE)を使用しているロボット。
なお、ギアボックスへの軽微な改造を施したロボット、同等性能(タミヤ製ギヤボックス等)のギアボックスを使用しているロボットもこのカテゴリーに分類する。
補足:
・ギアボックスが同じなら内蔵されているモータを交換してもノーマルカテゴリに分類することにした。(2008年度運営委員会)
・モータは260RAシリーズのマブチモータとする。(2012年度運営委員会)オープン ノーマル以外の移動機構を有するロボット。
注1:ターポリンシート((株)テラモト製、規格 KT-4200、厚さ 0.42mm、材質 塩化ビニール、色 薄緑、つや消し面が走行面)
注2:人工芝(TRUSCO トラスコ品番 405-4636、材質 表面:ポリプロピレン(PP)、裏面:合成ゴム(SBR)、幅(mm) 910、 厚さ(mm) 6、 質量(kg) 1.8、 色 グリーン 、長さ(m) 3 )、3mの辺を半分に切断して並べ,1.5m x 1.8m の大きさで使用する
- 競技会場によって全体のレイアウトや大きさ、あるいはライントレースのライン形状などが変わることがあります。
- ターポリンシート,人工芝の裁断やビニールテープの貼り方に誤差があるため、競技コースレイアウトの寸法通りとならない場合もあります。
- 競技会場の床面に凹凸がある場合,コース上に段差として表れることがあります.
- 日照や照明などの条件によってコース上の明るさが時刻あるいは場所によって変化することがあります.
- ロボット本体がラインからそれた場合(ラインアウト),走行領域のシートからはみ出した場合(コースアウト)はファールの対象となります。
- スタートライン後の最初の50cmはこのラインアウトのペナルティ,および,それに引き続きおこるハンドのペナルティをとりません。ただし,ボール積込エリアAにおいては,この条項を適用しません.
- 同じ直角コーナーで3回失敗した場合は、ハンドと引き換えに直角コーナー出口からラインの方向にロボットを向けて復帰することができます。
- ボール供給装置の主要寸法のみを記入した概略図を掲載します.
- 概略図のpdf, 概略図のdwg(AutoCAD図面)
- 下記の試作品とは,スライダのレバー位置が異なっていますので注意してください.
- ボール供給装置の部品リスト
- 職業能力開発大学校で作成した装置を,室蘭工業大学で採寸
- 図面のpdf,部品表2
- スライドレールが現物と異なるので,ボール止め板やレバーの寸法はまだ未定です.ただ,これらはホームセンターで売っているステーを利用して,ちょっと細くなりますが,同じようなものが作れると思います.
- 例えばこんなステーです.--> https://www.monotaro.com/s/c-86342/
- アクリルパイプは< http://www.hazaiya.co.jp/item/15000928.html >のサイトから φ45mm 厚さ2mm のものをカットしてもらうといいそうです.
- 職業能力開発大学校からの注釈の文章です.<ballsupplier_notes.pdf>
- パイプを支柱に止めるには,クッション材を介して結束バンドで固定するのが手軽だそうです。
- 職業能力開発大学校で作成した装置を,室蘭工業大学で採寸
- 試作品のイメージ図と動きは次の画像の通りです.
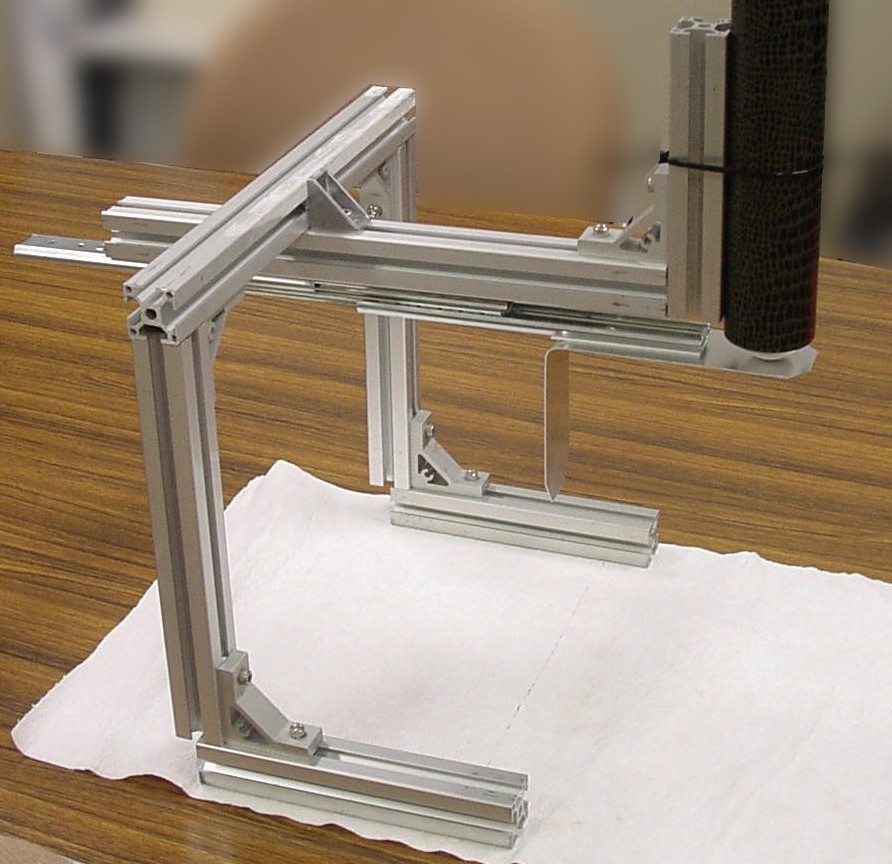 全体像.筒の中にボールが入っている.ロボットは右側からアプローチ.
全体像.筒の中にボールが入っている.ロボットは右側からアプローチ.
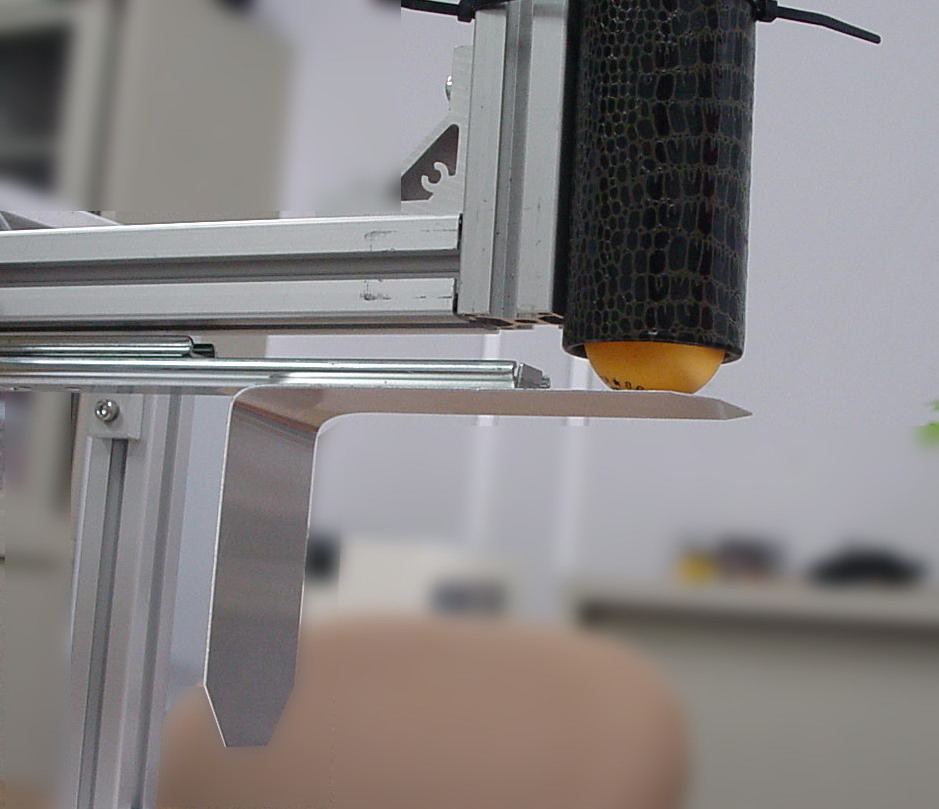 L字のレバーを押してスライドさせると,筒の中のボールが上から落ちてくる.
L字のレバーを押してスライドさせると,筒の中のボールが上から落ちてくる.
装置の動作を表す動画です.