現行の測距センサ(GP2D12)と代替の測距センサ(GP2Y0A21YK0F)の出力電圧を計測し比較した.
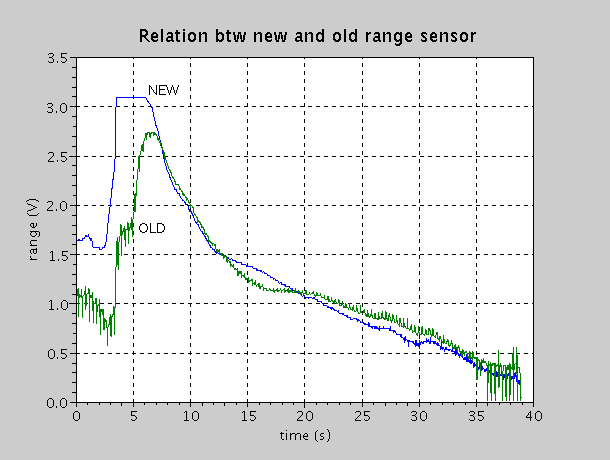
まず,現行と代替のセンサを1つずつ並べて,徐々に対象物との距離を大きくしたときの波形を示す.
横軸は時間(距離では無いので注意),縦軸はセンサの出力電圧である.NEW が代替品,OLDが現行品である.
0 秒は対象物がセンサの受光部についた状況で,2.5秒くらいから離し始めた.ある程度(10cmほど?)対象物が離れるまで電圧値は増加し,その後,減少に転じた.7 秒以降は両者の出力電圧はほぼ重なった.
標準ロボットキットのメイン基板では出力電圧を2倍してマイコンに入力している.マイコンのアナログ入力の範囲は0〜5Vなので,グラフにおいて2.5Vを超えた部分では距離をきちんと測定できない.製品のカタログによると現行品および代替品ともおよそ9cm以内である.よって,10cmを超える距離では両者にそれほど特性の差はないと判断できる.
横軸を代替センサの出力電圧,縦軸を現行センサの出力電圧としたグラフを下に示す.

グラフにおいて7 秒以降のデータはほぼ (old)=(new) の線上にのっている.このグラフからも,センサーを現行品を代替品で置き換えても,メイン基板の回路を変更しなくてよいと判断できる.
(花島直彦, 2009.4.26 )