

ボディの寸法を大まかに決めるために,車輪も組み立てておきましょう.
ギヤボックス・エンコーダモジュールを仮置きして下さい.つぎに,キャスタ,単三用電池ボックス,角型電池006P,プリント基板を仮置きし,出来上がりのボディの大きさや部品取り付けの寸法を決めていきます.ギヤボックスのある方をロボットの後方,キャスタのある方を前方した後輪駆動方式が機能的です.ラインセンサ基板はキャスタより前方に置きます.電源スイッチ(トグルスイッチ)の取り付け方や取り付け位置もこの段階で考えて下さい.
ギヤボックス・ロータリーエンコーダモジュールはボディの上面に取り付けても構いませんが,ここではボディの下側に取り付けることにして製作を続けることにします.競技用にモータや別な基板も取り付けようと考えている方は,この段階でどこにどのように置くかを決めて,最終的なボディの形を決定して下さい.
ボディの形を考えるところが,楽しくもあり,また辛いところでもあります.ここでは写真のような形にしてみました.
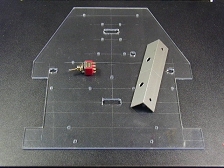
※カッターナイフを使うと塩ビ板の上に細い直線を描くことができます.
※ビスとナットを使って部品を取り付けることもできますが,ハンドタップがあるのなら,塩ビ板の方にタップを立ててビスだけで止める方が楽です.
※ドリルで穴を開けるときには中心にポンチを打ってから開けると穴の位置が狂いません.
※塩ビ板に四角い穴を開けるには,最初にドリルで穴を幾つか接近させて開けておき,ニッパーで穴と穴との間の塩ビを切り取ります.ヤスリが入る大きさの穴が開いたなら,後は平ヤスリで仕上げていきます.
※電池は結構重量があります.旋回性能の良いロボットに仕上げたいのであれば,重量のあるものは出来るだけ車軸の中心(旋回中心)の近くに配置して慣性モーメントの値が小さくなるように配慮する必要があります.
一通りボディの加工が終わったら,ギヤボックスエンコーダモジュールやマイコンボード,電池ボックス,キャスタなどを取り付けてボディを組み立ててみます.部品がうまく取り付けられるかどうか確認して下さい.今はまだ配線が済んでいませんが,エンコーダ基板からベース基板へとビニール被覆線を導かなければなりません.この線は塩ビ板を通して配線されることになりますが,その穴の大きさは大丈夫でしょうか.センサ基板へつなげる配線も穴を通すことにするのであれば,後で分解できるようにコネクタが通る大きさの穴を開けておくべきです.
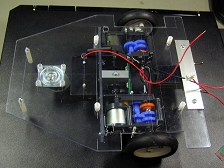
キャスタは5mmのスペーサを挟んで取り付けます.ロボットを水平なところに置いたとき,もしもキャスタの側が下がっているようでしたら,ビスナットセットの中に入っているワッシャをかませて高さを調節して下さい.
006Pの乾電池は専用の電池ホルダーを購入してボディーに取り付けてもよいですが,マジックテープでつけても大丈夫です.電池交換の際の取り外しが簡単です.電池側のマジックテープの粘着力も結構もちます.
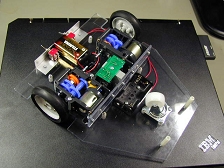
これ以上ボディの加工は必要がない,という段階まで詰めたら着色に取り掛かりましょう.材質が塩ビですから市販のスプレー式塗料で簡単に着色ができます.
工作の過程でマシンオイルや手の油で塩ビ板が汚れているはずですから,手洗い用の洗剤をつけて洗い,油脂分をきれいにとり去りましょう.よく乾いたことを確認してから着色にかかります.スプレー缶を湯せんなどで暖めて塗料の温度を上げてから吹き付けると粒子が細かくなるので,きれいに仕上がります.なお,塗装は薄く何度も塗るのがコツです.