塗装済みのボディに部品を取り付け,ロボットを組み立てます.そして,配線用のビニール線が入った袋の中から赤色ビニール線4本,黒色ビニール線3本を取り出しておきます.2ピン用のコネクタハウジング2個,3ピン用のコネクタハウジング1個も必要です.半田づけも行いますので,ニッパー,ラジオペンチ,ワイヤーストリッパも用意して下さい.テスターも使います.
最初にメイン基板のコネクタベースCN9に3ピンのハウジングを差込んだときに,左から赤,赤,黒の順にビニールコードが並ぶように,線のハーネス(コネクタピンがささる金属部分)をハウジングに挿入します.この色の順番はとても大切です.順番を間違えると電子回路を壊してしまいます.ハーネスをハウジングに差し込むときは「返し」のある方をハウジング側面の穴の向きにして差し込みます.カチッといってそれ以上奥に進まなくなったら完了です.ビニール線を引っ張っても抜けませんね.3本ともハーネスに差し込んだなら一度基板側のコネクタベースに装着してみて下さい.
黒色の線は単三用電池ボックスから出ている黒色の線と006P用の電池スナップから出ている黒い線につなげます(この作業中は電池は装着しないで下さい).赤色の線は両方とも電源スイッチに接続します.といってもボードがボディに取り付けられたままでは配線ができません.一度ボードの取り付けビスをはずし,作業がし易いようにしてから,上のような配線ができるように少し余裕をもってビニール線をニッパーで切断します.後は,ボードからハウジングを抜き,先ほどのように線同士,あるいは線とスイッチをそれぞれ半田づけします.黒色の線同士の半田づけ部分は熱収縮チューブ(スミチューブ)で覆いボードと接触しても大丈夫なように電気的に絶縁しておきましょう.このチューブはライターの炎などを近づけると縮むという性質をもっているので,テープを巻いて絶縁するよりも楽です.ただし,半田で線同士を付ける前にチューブをコードに差し込んでおかなければなりませんよ,ってこれ位のことは書かなくても大丈夫ですよね.
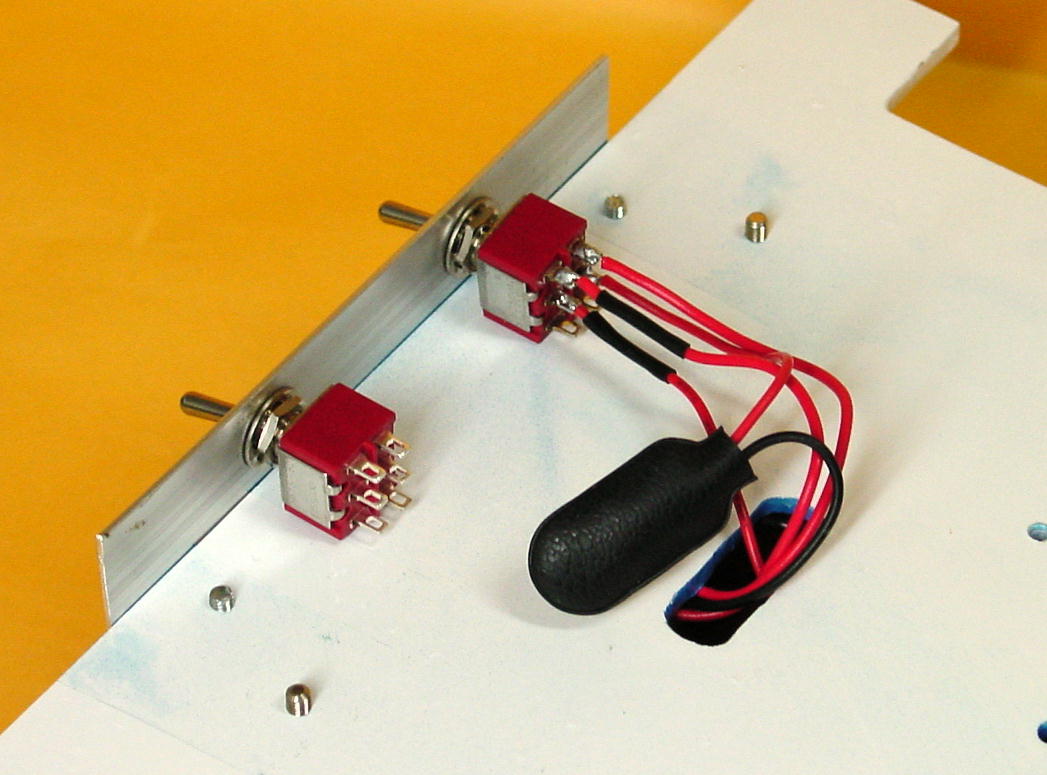
トグルスイッチへの接続の仕方は,006P用の電池スナップから出ている赤色線(+9V)と3ピンのコネクタの真ん中からでている赤色線とを,そして単三の電池ボックスから出ている赤色線とコネクタの左端から出ている赤色線とを同時にON/OFFできるように半田づけします.スイッチの端子は3個づつ縦に2列並んでいます.少し長い真ん中の端子に線を半田付けし,つぎに同じ列の上の端子にもう片方を付けます.このように接続すると,レバーを半田付けしていない端子の方へ倒したときに線同士が接続(ON)されることになります.私は,線同士が区別できるように,単三の電池ボックスからの線とコネクタの左端の線に黒い色をつけて作業を行いました.半田付けの作業が済んだら,写真のように「コード止め」で線を束ねて固定しておくとよいでしょう(ちなみに,コード止め金具は10個入って170円でした).
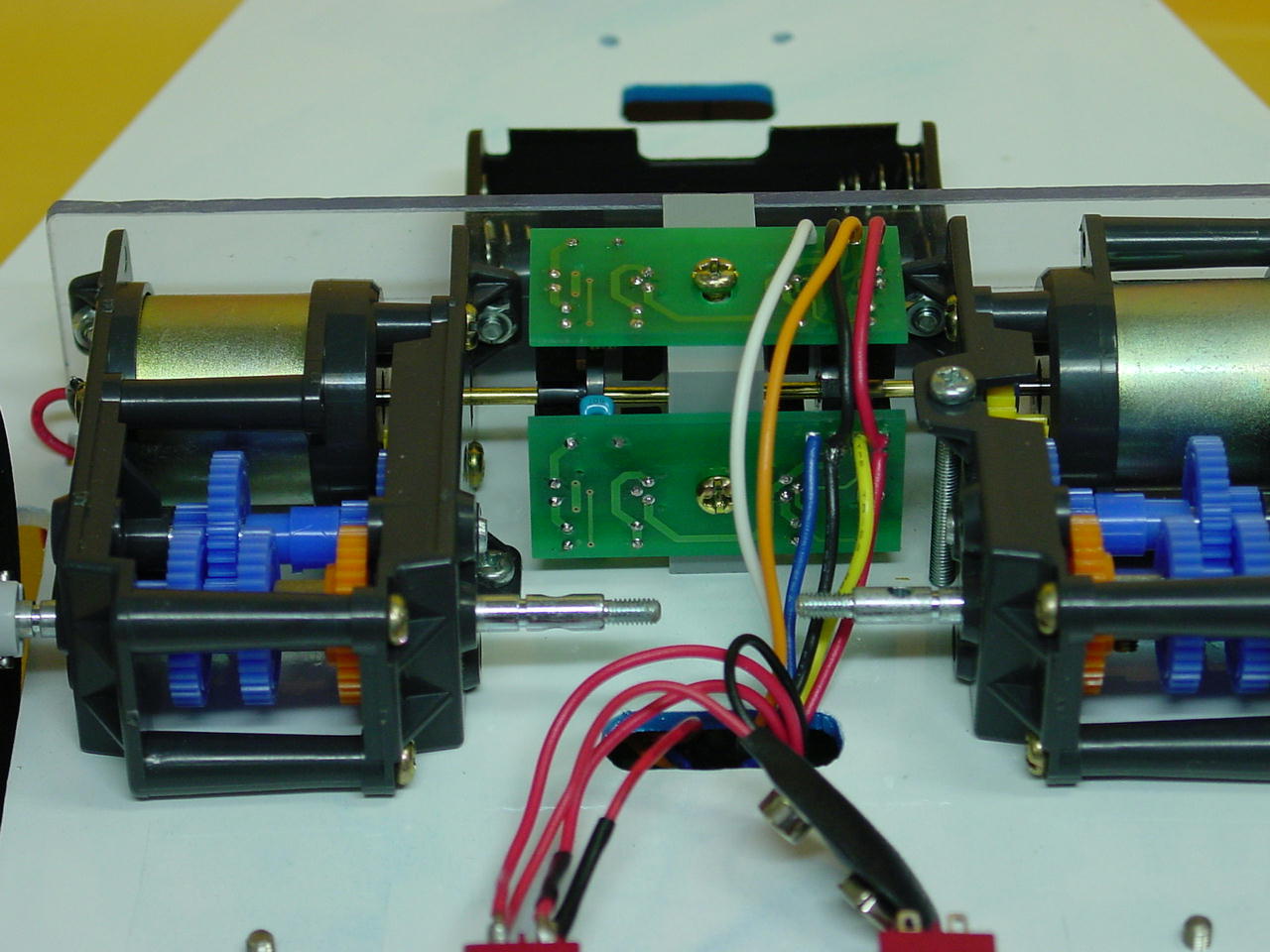
つぎは,メイン基板を取り付けて基板からモータまでの配線を行います.CN8から出る線は左車輪用のモータに,そしてCN10から出る線は右車輪用のモータにそれぞれつなげます.これらの線はそのままモータまでもっていくのではなく,撚り線にしておくとすっきりします.赤色と黒色のビニール線を,少し長めにモータに半田付けして下さい.後で調整しますので,いまのところはどの線をモータのどの端子につけるべきかは考えずにただつけておきます.
モータへの配線が済んだら,つぎはロータリーエンコーダとボードとの配線です.
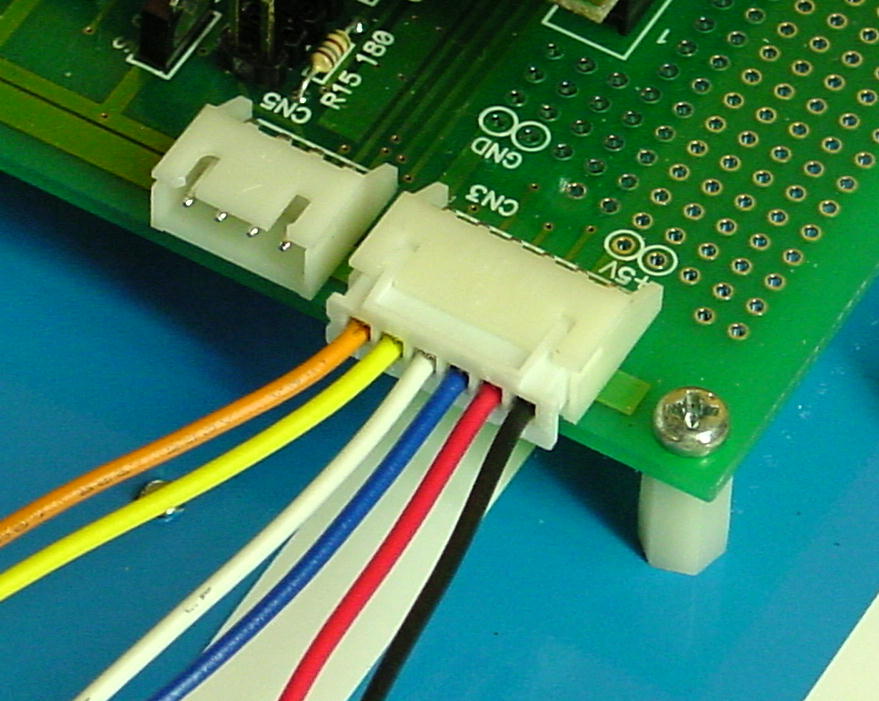
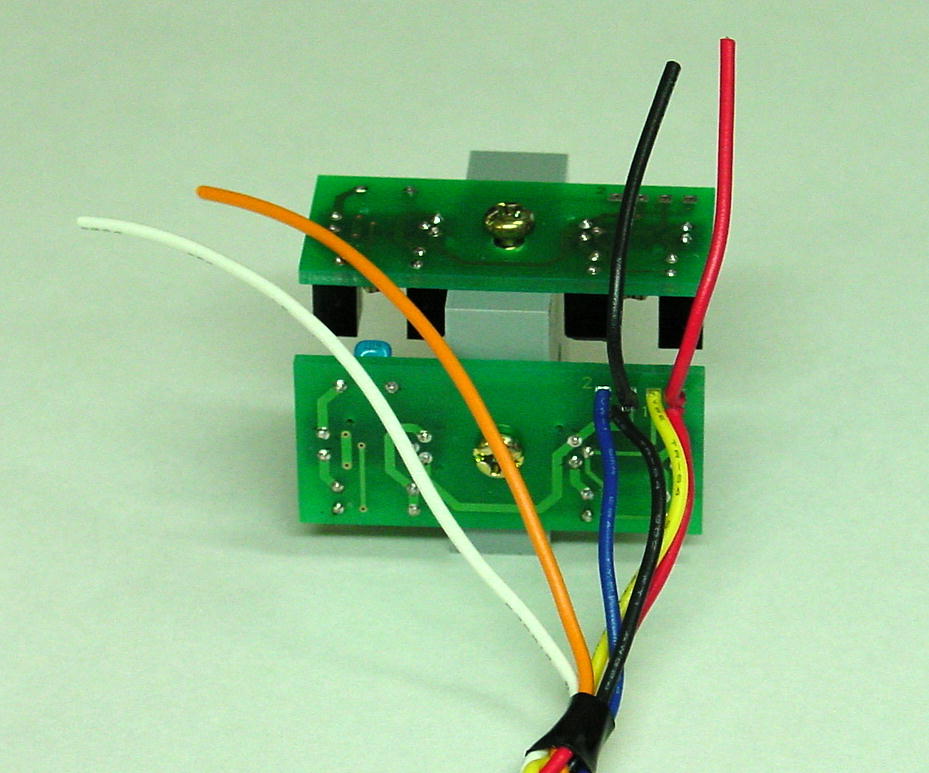
写真に示すように,ハウジングをCN3のベースに差し込んだとき,左から橙色,黄色,白色,青色,赤色,黒色の順になるようにビニール線をセットして下さい.つぎに,これらの線を束ねて(あるいは編んで)エンコーダ基板のところまで引き回していき,エンコーダ基板にビニール線を半田づけしていきます.ここで,少し注意です.2枚のエンコーダ基板の上に描かれている"+"の記号同士を赤色のビニール線で,そして"−"の記号同士を黒色のビニール線で予め配線しておき,そこへ引き回してきた赤色の線,黒色の線をそれぞれ接続します.最初に2枚の基板をつなぐ線は左下の写真のように工作してから半田付けすると作業が楽に済みます.まず,4.5cmほど線を切り取りこのうちの片方の被覆を1.5cm剥きます.裸になった線を撚り,先がビニール被覆と3mmほど重なるように折り返します.つぎにビニールと重なった部分をそのままにしてその先の部分をさらに撚ります.線の反対側の被覆も3mm程度剥き基板の穴にそれぞれ差し込んで半田付けします.
電源ライン以外の線は右側の写真のように半田付けして下さい.エンコーダ用固定具の側面に付ける基板は,1と書かれているスルーホールの所に黄色のビニール線を,2と書かれているするホールには青色のビニール線をそれぞれ半田付けします.上側に取り付けられる基板の方は1と書かれているところに橙色のビニール線を,そして2と書かれているところには白色のビニール線をつけます.
マイコンにプログラムを書き込むときに,わざわざマイコンボード上のジャンパースイッチを抜き差しするのは煩わしいものです.そこで,もう一つのトグルスイッチを使って,ブートモード(書込み時)とノーマルモード(実行時)の切り替えができるようにします.
左の写真に示すように,ハウジングをCN4のベースに差し込んだとき,左から白色(P85),黒色(NMI),黒色(GND),赤色(Vcc)の順になるようにビニール線をセットします.括弧内の記号はそれぞれの線が,マイコンボードのどのポートに当たるかを表しています.
つぎに,これらの線を束ねて(あるいは編んで)エンコーダ基板のところまで引き回していき,もう一つのトグルスイッチにハンダ付けします.
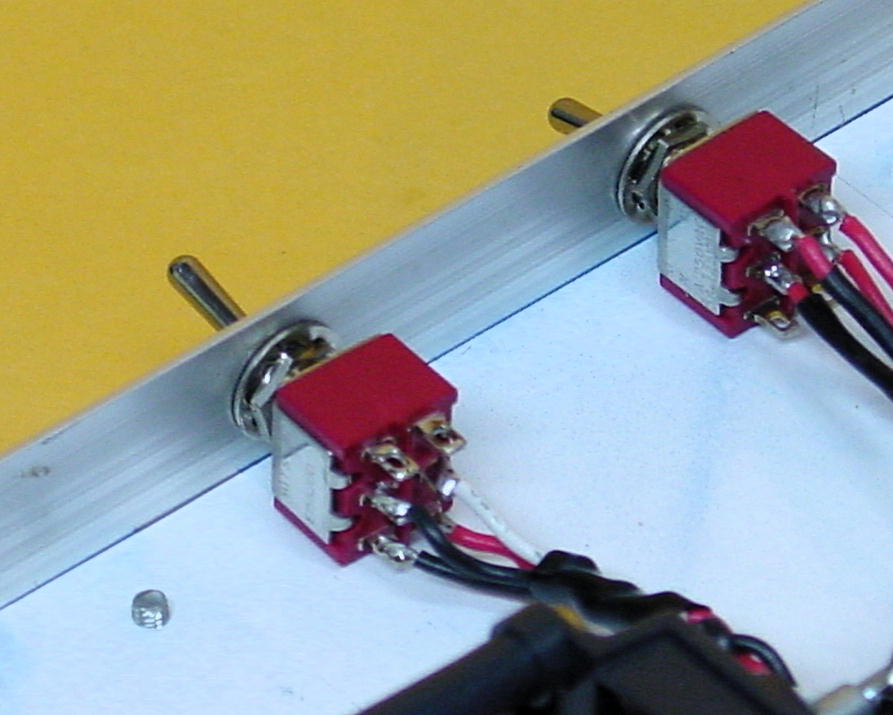
トグルスイッチをブートモードにした時に,白色と赤色の線同士と,2本の黒色の線同士が同時につながるようにします.トグルスイッチをノーマルモードにしたときには,どの線もつながりません.左の写真の左側のトグルスイッチを参考にして下さい.
左上の写真のようにハンダ付けすると,ロボットを引っくり返してみたときに(左写真),トグルスイッチを下側に倒した時にブートモード(B),上側に倒した時にノーマルモード(N)となります.
配線がすべて済んだなら,赤色ビニール線と黒色ビニール線が指示通りの位置に繋がっているかどうかもう一度確認をしておきましょう.赤色は電源のプラスライン,黒色はグラウンドを表していますので,これが逆になるような接続になっていると電子回路を破損させますので注意しなければなりません.それからもう一つ,タイニーマイコンのピンヘッダをメイン基板にさすときに,ストッパー(?)がついていませんので,1列ずらして差し込んでしまうことがあります.これも回路の重大な破損につながります.忘れがちですがマイコンをメイン基板に差し込むときはよく確認して下さい.
確認が済んだなら,電圧をモニターするためのリード線をマイコンボードに写真のように半田付けしておきましょう.CN1の23ピンに黒色の線,21ピンに赤色の線を付けますが,長さを変えて線の露出した部分が接触しないようにしておきます.
では,新しい電池を取り付けて電源スイッチを入れてみましょう.ドキドキする瞬間ですが,焼けるような匂いがしなければ大丈夫です.現在の回路では指示通りに配線されている場合にはスイッチを入れても何も起きません.スイッチを入れたまま,先ほど取り付けたモニター用の線の間の電圧をテスターで測ってみて下さい.5Vに極めて近い電圧が出ているとO.K.です.もしも単三電池の電圧が出ているようでしたら,006Pと単三電池のプラス側の線の配線をスイッチのところで取り違えています.