浜松ホトニクスのS-7136から半田付けから始めましょう.このICは4番ピンだけが少しピンの長さが短くなっています(左の図はICを上から見た図です).エンコーダ基板の上にはシルク印刷で右の黒線で描いたような図が書かれていますので,スルーホールには図に示したピン番号に対応させて各ピンを挿入して半田付けを行います.ただし,床面からの反射光を効率よく受光できるように,IC本体を基板とピッタリと密着するように取り付けて下さい.
ICを差し込んだ基板を裏返しにし,机の上などの硬い面にICを押し付けるように半田付けするとよいでしょう.S-7136は2個とも取り付けてしまいます.
基板上のR1,R2の所には抵抗値が書いてありませんが,ここには 1kΩの抵抗器をそれぞれ取り付けます.
つぎはこのICの外側に赤外LEDのTLN119を付けましょう.透明の素子です(同梱のフォトトランジスタTPS615とは色も形もそっくりですので,どちらか分からなくならないように気をつけましょう).長いほうのリードはアノード(Anode,陽極),短いリードはカソード(Cathode,陰極)と呼ばれ,基板上のスルーホールはそれぞれA,Cで区別されています.これらのLEDは光軸が基板と直交するように,そして本体が基板から1mm〜1.5mm程度浮くように取り付けて下さい.
つぎに,中央部の1個の赤外LEDと2個のホトトランジスタTPS615を1mm〜1.5mm程度浮かして取り付けます.雰囲気的(?)には中央の赤外LED-TLN113を取り付けてから高さが左右均等になるようにホトトランジスタを取り付けると良さそうです.注意点はこれら3個の光軸がすべて基板と直交するように取り付けるということ.
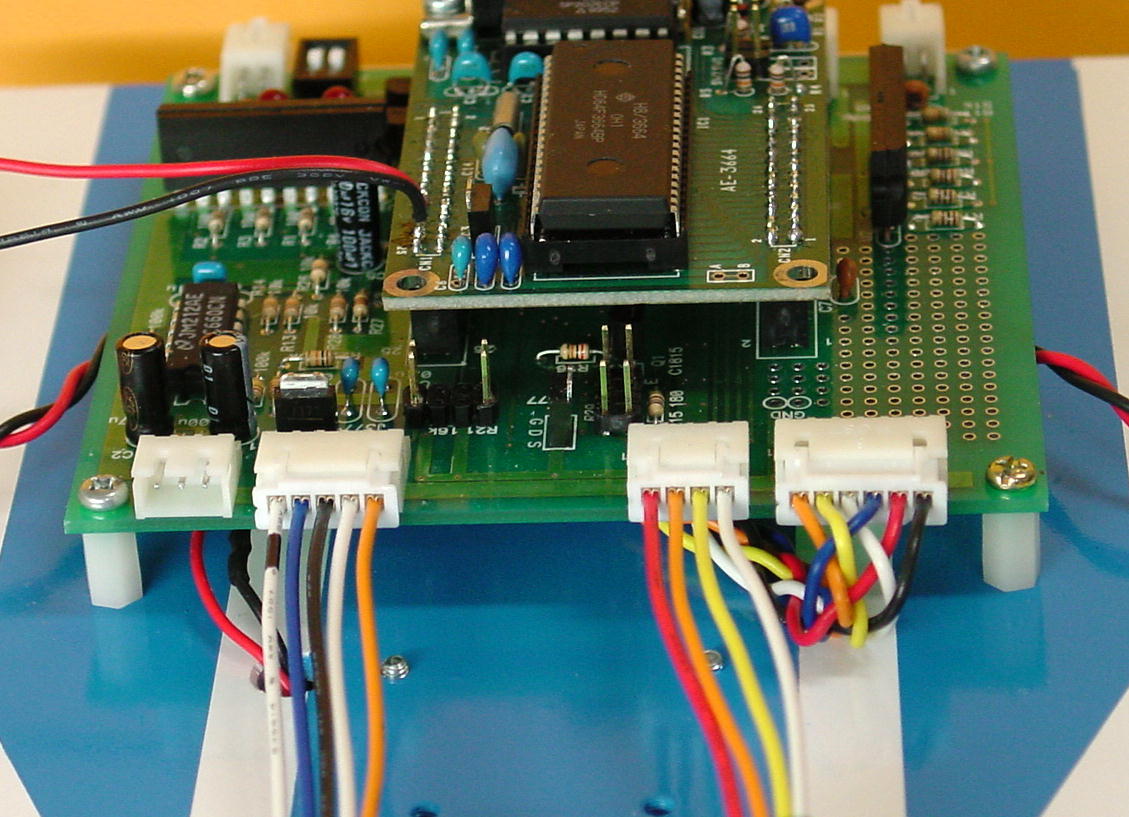
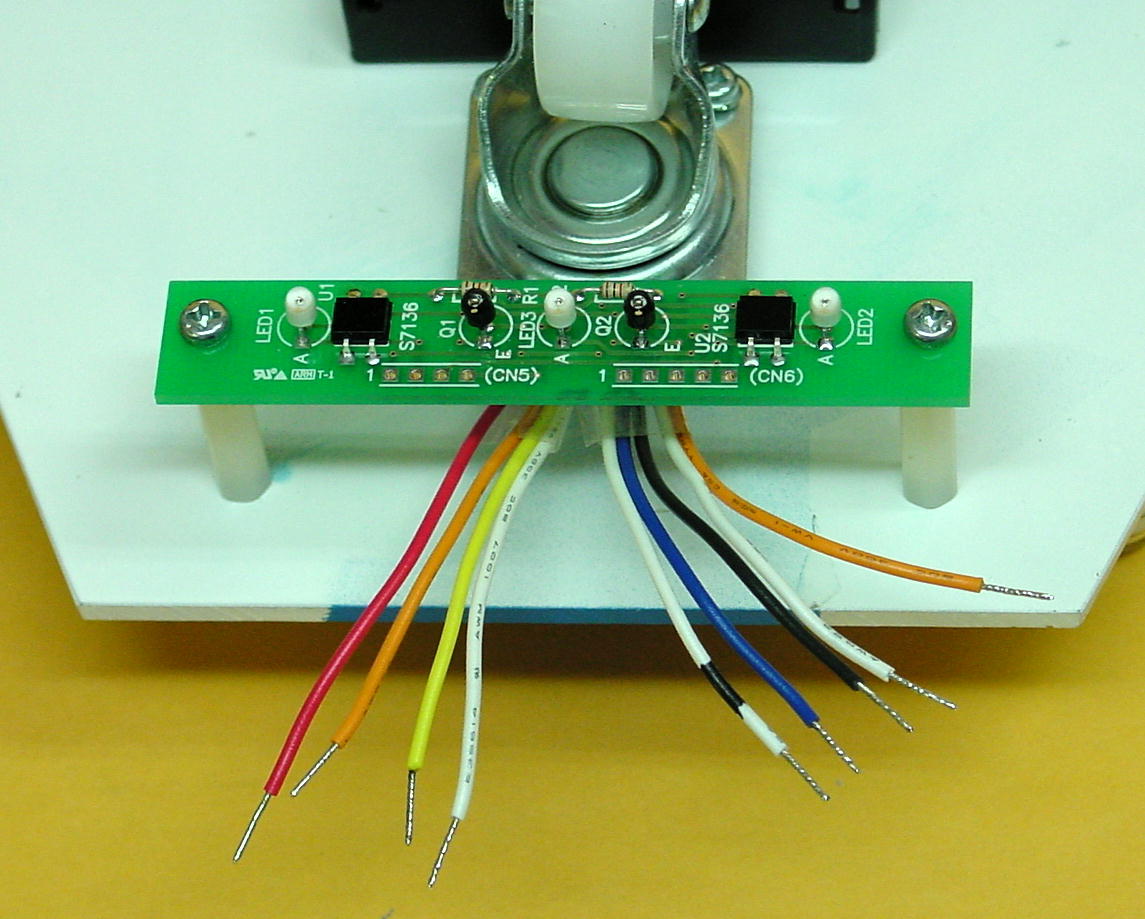
作業中に電源スイッチが誤って入ってショートしては困りますから,ロボット本体の電池をすべてはずしてから配線に取り掛かります.まず,左の写真のように,CN5用のハウジングには左から赤色,橙色,黄色,白色のビニール線をセットします.またCN6用のハウジングには左から白色,青色,黒色,白色,橙色をセットします.パックで用意した色の都合上,CN6の配線には白色が2本含まれます.これらを区別できるように,CN6の1番ピン(一番左端)の白色ビニール線にはマジックで印を付けておきましょう.
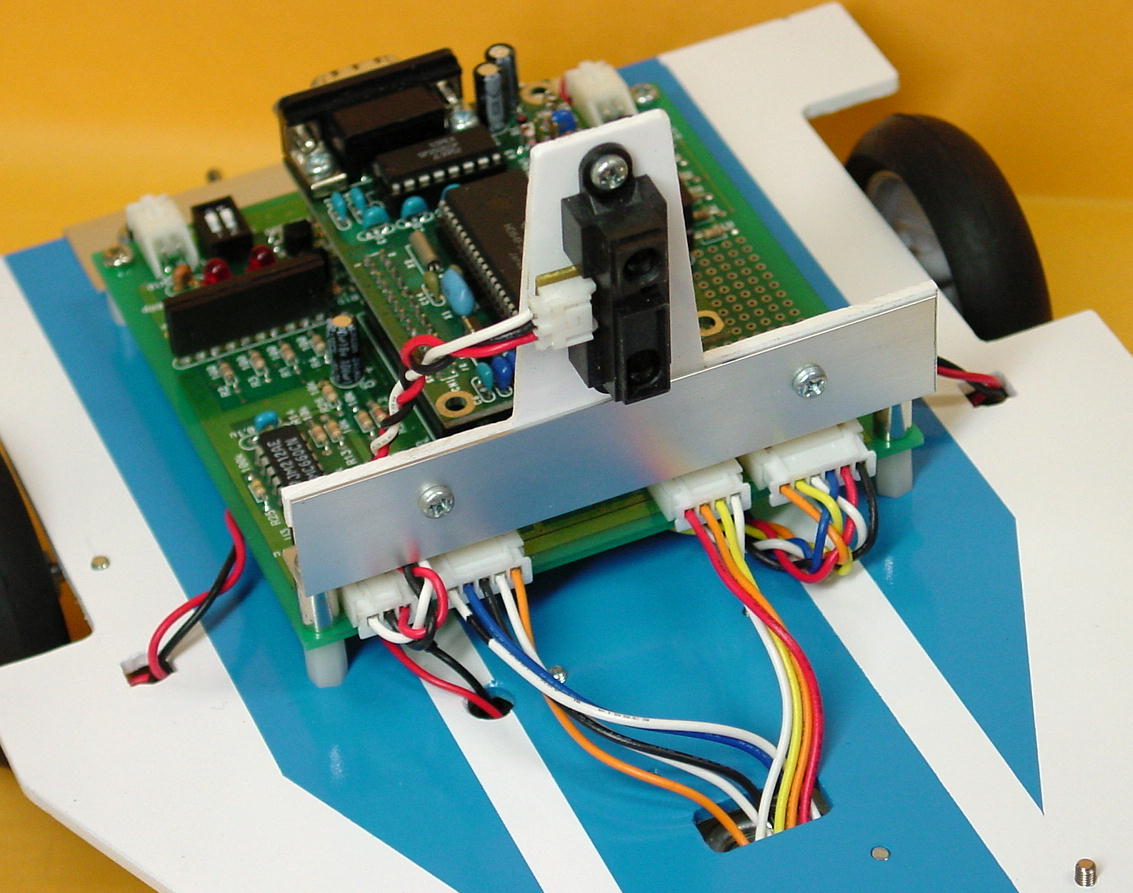
つぎに,センサ基板を正規の位置に取り付けます.コードを配線に必要な長さに切断して先端の被覆を向き,写真のように露出した線を撚っておきます.この撚った部分をボードの裏から基板に差込み半田付けを行います.差し込みは,ボードのCN5の1番ピンから出ているコードはセンサ基板の(CN5)の1番のスルーホールに,2番ピンから出ているコードは(CN5)の2番のスルーホールに,・・・というように順に対応させればよく,一本ずつ半田付けを行っていきます.コードの先端を差し込んだとき,撚り線の一部が差し込まれずに残ることのないように注意して下さい.このような線が残って隣の線と接触するようなことがあると回路が正しく動作しないばかりでなく,回路を損傷してしまうことがあります.
ベース基板上のCN7用のハウジングには左から白色,黒色,赤色の順にコードを差込みます.次に,距離センサを取り付け,配線に必要なコードの長さを決めて切断します.その後,コネクタハウジングを抜いて下さい.
さて,ここからが細かな作業です.まず,ペンチと輪ゴムを用意して,写真のような工具(?)を作ります.この工具を使って,コードの端に距離センサのコネクタベースに差し込むハーネスを取り付けていきます.

「お助けパック」の中に小ぶりの3ピンのハウジングとハーネスが5個入った袋があったはずです.それを用意して下さい.
ハーネスを一個取り出し,その頭をペンチでつまんで,写真のように置きます.ハーネスの頭の裏側には「返し」がありますので,置いたときに頭の方が少し高く,そして逆側の「かしめる」ところが机の面に接するようになっているのがベストです.
「頭」と「かしめる部分」との間の部分に先ほどのコードの端をハンダ付けしますので,先にコテで暖めて半田をもり,半田メッキを施します.このとき,半田を盛り過ぎると頭の方にも半田が流れて固まってしまい,ハーネスがコネクタベースのピンに入らなくなってしまいます.予備メッキの半田は必要最小限に盛りましょう.


先ほどのコードの端の被覆を2mm 程剥き,軽く半田メッキをして下さい.つぎに,ハーネスにコードの先を押し付け,コテで上から加熱します.半田を盛り過ぎていなければ,これでハーネスの頭の方に半田が流れることなく,しっかりと半田付けされるはずです(コードが違っているけどお許しを!).確認のため,ここで距離センサのコネクタベースピンに直に差して見て下さい.もし,ハーネスの頭の方にも半田が流れてピンに入らないようなら今つけたハーネスを根元からニッパーで切り取り,最初からやり直して下さい(予備は2個しかありませんから,慎重に!).
ハンダ付けがうまくいったなら,ハーネスの根元をラジオペンチでビニール線を巻くようにかしめて下さい.銅線が細いと,かしめ用の「ヒレ」の部分が余ってしまいます.このような恐れのあるときは,予めニッパーでヒレを適当な長さに切ってから巻きつけます.


三本のコードともハーネスづけに成功したなら,ハウジングの左から白色,黒色,赤色の順にハーネスを差込み,ボードと距離センサの間の配線コードの製作は終わりです.
以上で配線はとりあえずすべて終了です.CN4に何も配線されていませんが,このコネクタ端子の使用は「競技用標準ロボットの詳細」のページで触れることにします.ライン検出センサ,ライントレースセンサの調整も「競技用標準ロボットの詳細」で行うことにします.